
登发
心怀感恩,处处皆是美好
- 飞登外卖商户定价政策 一、价格一致性的利弊与适用场景优势用户信任感强:避免“外卖比堂食贵”的负面体验(如网页6案例:某平台因价格差异导致30%用户流失),尤其适合价格敏感的学生群体。减少比价行为,提升下单决策效率。商户管理简化:无需频繁调整线上价格,降低运营成本;避免商户通过虚高标价变相抵消平台抽成(如网页10中商户将15元餐品标价18元)。平台合规性:符合部分高校对“校园商业公平性”的要求(如禁止外卖平台恶意加价)。劣势商户利润受限:若抽成较高(如18%),商户可能因利润不足退出(网页7:20%抽成下商户续约率仅65%);难以通过价格调整对冲配送成本或促销需求。灵活性不足:无法针对特定时段(如夜宵)或活动(如节日促销)动态调价。适用场景平台初期:需快速建立用户信任时;高竞争环境:若竞品存在加价乱象,可打“同价”差异化卖点;标准化商户:如学校食堂、连锁奶茶店等价格体系稳定的商家。二、商户自主定价的利弊与适用场景优势商户灵活性高:可自主设置“外卖专属价”覆盖配送成本(如堂食15元,外卖17元);支持动态促销(如限时折扣、满减组合),提升订单量(网页6:某商户通过自主定价使订单增长40%)。平台抽成空间大:商户可通过加价分摊抽成压力,平台可维持较高佣金率(如20%)。劣势用户抵触风险:学生群体对价格敏感,加价易引发差评(如网页10:某平台因加价被学生集体抵制);需投入更多资源监管商户恶意标价(如10元商品标价30元)。管理复杂度高:需开发价格审核系统,或人工抽查标价合理性(增加运营成本)。适用场景平台成熟期:用户黏性较高,对小幅加价接受度强;高毛利品类:如奶茶、炸鸡等溢价空间大的商品;差异化服务:如提供“即时配送”“夜宵专送”等增值服务时。三、折中方案:有限自主定价 + 透明化规则1. 基础价格一致性 + 允许附加服务费规则:要求商品基础价与线下一致,但允许商户收取“打包费”(1-2元)或“高峰时段服务费”(1-3元),需明确标注(如网页6的透明化收费案例)。示例:堂食价格:15元外卖标价:15元(基础价)+ 2元(打包费)= 17元(用户实际支付)2. 套餐化间接提价强制单品价格一致,但允许商户设计外卖专属套餐(如“15元盖饭+5元饮料=18元套餐”),变相提高客单价(网页6成功案例:套餐化使商户利润提升22%)。3. 动态补贴机制平台对高抽成商户提供配送费补贴(如抽成18%的商户,平台承担1元配送费),降低用户实际支付价。四、决策建议维度选择价格一致性选择商户自主定价平台阶段初期获客期成熟运营期用户画像价格敏感型(如普通学生)对便利性需求>价格(如研究生、教职工)商户类型食堂、平价餐饮奶茶店、品牌连锁店竞争环境竞品存在加价乱象竞品允许自主定价且用户接受度高 经过对比,目前平台属于初始获客期,当前选择价格一致性政策,要求平台商家商品定价必须和店内菜单一致,价格更改需要平台方审核,服务费率费用20%收取,特殊店铺一店一议,配送费由平台100%收取,用户中心1环内暂定3元一单(通过配送费减免政策临时减免到2元/单),打包费原则上不允许加收,包装费至高1元
-
- 飞登外卖待办事项 1、超过4个标签部分标签就不显示了2、如果用户已经收藏了店铺,领取收藏类代金券会取消收藏(考虑暂时禁用)3、招商加盟页面无法正确提交5、首页背景优化6、分账或自动提现7、颜色自由配置8、下单自取功能暂时屏蔽,后面有时间再修复9、平台红包无法展示10、订单状态同步和码科不能完全一致,有时候取消或完成会返回失败,不提示具体原因11、聊天消息功能开发12、下单后类似美团展示骑手、用户位置的地图展示13、大牌臻享页面需要美化,14、IOS端满减标签两端缺失 15、商家增加分类防抖,避免一下添加两个16、商品快速导入存在问题17、商品列表外更改排序,提示库存不能小于018、点击清空购物车,页面没有刷新,原来加购的商品的数量还显示
-
-
-
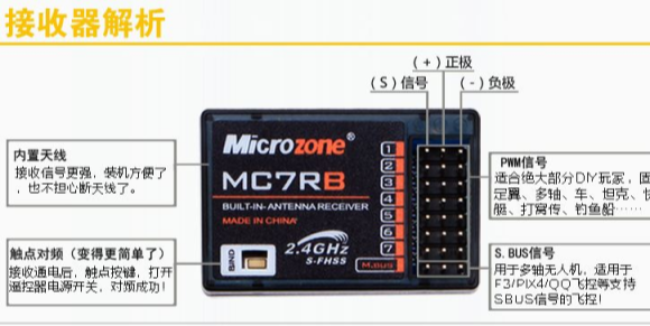
 Mission Planner下载地址记录 Mission Planne地面站1.3.30版本---https://pan.baidu.com/s/1yZ_l_V_u9LjohbMQBAkXJg 提取码: 9e2u 1.3.59版本---https://pan.baidu.com/s/1cYBDCdu67xOEzhyDuNlkNw 提取码: ikwm1.3.68版本---https://pan.baidu.com/s/1NKBipA9u4au_TMKTdU75GQ 提取码: u63i1.3.74版本---https://pan.baidu.com/s/1ffBh3eWkzHWnoE47TK1XoA 提取码: s9ja最新版本---http://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-latest.msi Pixhawk飞控 LED指示灯含义:1、红灯和蓝灯闪:初始化中,请稍等;陀螺仪初始化。2、黄灯双闪:错误,系统拒绝解锁;解锁前检查失败。3、蓝灯闪:未解锁,GPS搜星中,GPS未定位,可用自稳定高解锁。4、绿灯闪:未解锁,GPS已定位,可用定点模式解锁。5、绿灯常亮:已解锁,GPS已定位,定点、一键返航可用!6、蓝灯常亮:已解锁,GPS未定位,定点、一键返航不可用!7、黄灯闪:遥控故障保护被激活;电台故障保护激活。8、黄灯闪加快速重复响:电池故障保护被激活。9、黄灯蓝灯闪加高-高-高-低响:GPS 数据异常或者GPS故障保护被激活。
Mission Planner下载地址记录 Mission Planne地面站1.3.30版本---https://pan.baidu.com/s/1yZ_l_V_u9LjohbMQBAkXJg 提取码: 9e2u 1.3.59版本---https://pan.baidu.com/s/1cYBDCdu67xOEzhyDuNlkNw 提取码: ikwm1.3.68版本---https://pan.baidu.com/s/1NKBipA9u4au_TMKTdU75GQ 提取码: u63i1.3.74版本---https://pan.baidu.com/s/1ffBh3eWkzHWnoE47TK1XoA 提取码: s9ja最新版本---http://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-latest.msi Pixhawk飞控 LED指示灯含义:1、红灯和蓝灯闪:初始化中,请稍等;陀螺仪初始化。2、黄灯双闪:错误,系统拒绝解锁;解锁前检查失败。3、蓝灯闪:未解锁,GPS搜星中,GPS未定位,可用自稳定高解锁。4、绿灯闪:未解锁,GPS已定位,可用定点模式解锁。5、绿灯常亮:已解锁,GPS已定位,定点、一键返航可用!6、蓝灯常亮:已解锁,GPS未定位,定点、一键返航不可用!7、黄灯闪:遥控故障保护被激活;电台故障保护激活。8、黄灯闪加快速重复响:电池故障保护被激活。9、黄灯蓝灯闪加高-高-高-低响:GPS 数据异常或者GPS故障保护被激活。 -
-

-
 ROS教程合集(4)—Visual Studio Code 的安装和设置 1、下载程序打开浏览器,进入百度,搜索vscode,在列出的结果中找到code.visualstudio.com,如下图点击下图右上角蓝色的Download按钮,然后点击企鹅图标下的.deb按钮,如下图等待下载完成进入下载文件夹,右键点击空白处,选择在终端打开然后输入指令 sudo dpkg -i code然后点击Tab按键补全,如下图,回车输入密码,执行安装在终端界程序面输入code,即可打开程序,如下图2、导入工作空间点击File,选择Add Folder to Workspace,双击catkin_ws,选择src文件夹,然后点击Add按钮这时候可以在左侧工作空间看到src目录3、安装简体中文语言点击界面最左侧框选的插件模块,在搜索栏输入chinese,选择下图框选的结果,点击Install进行安装安装完成以后重启Vs Code4、安装ROS插件
ROS教程合集(4)—Visual Studio Code 的安装和设置 1、下载程序打开浏览器,进入百度,搜索vscode,在列出的结果中找到code.visualstudio.com,如下图点击下图右上角蓝色的Download按钮,然后点击企鹅图标下的.deb按钮,如下图等待下载完成进入下载文件夹,右键点击空白处,选择在终端打开然后输入指令 sudo dpkg -i code然后点击Tab按键补全,如下图,回车输入密码,执行安装在终端界程序面输入code,即可打开程序,如下图2、导入工作空间点击File,选择Add Folder to Workspace,双击catkin_ws,选择src文件夹,然后点击Add按钮这时候可以在左侧工作空间看到src目录3、安装简体中文语言点击界面最左侧框选的插件模块,在搜索栏输入chinese,选择下图框选的结果,点击Install进行安装安装完成以后重启Vs Code4、安装ROS插件 -
 使用 Arduino IDE 编程你的 STM32 许多电子爱好者和工程师开始接触电子产品时,Arduino是他们的第一块开发板。然而,随着接触越多和深入挖掘,很快就意识到 Arduino 还没有为工业做好准备,而且它的 8 位 CPU 的速度非常慢,不能为您的项目提供足够的动力。不过,现在市场上有新的STM32F103C8T6 STM32开发板,它拥有 32 位的 CPU 和ARM Cortex M3 架构可以轻松超越 Arduino 。并且我们可以使用Arduino IDE对STM32板进行编程。在本文中,我们开始使用 STM32F103C8T6,了解有关此板的一些基础知识并使用 Arduino IDE对其编程, 实现板载 LED 灯闪烁。STM32(Blue Pill)开发板介绍STM32F103C8T6 开发板是 ARM Cortex M3 微控制器的开发板。它看起来与 Arduino Nano 非常相似,如下图所示。它上面的单片机芯片是 STMicroelectronics 的STM32F103C8T6,该MCU 可以在深度睡眠模式下运行,非常适合使用电池供电的应用。由于 MCU 的工作为3.3V,因此该板还包含一个 5V 至 3.3V 的降压 IC为 MCU 供电。即使 MCU 在 3.3V 下运行,它的大多数 GPIO 引脚都可以承受 5V。开发板上有两个板载 LED,一个(红色)用于电源指示,另一个(绿色)连接到 GPIO 引脚 PC13。它还有两个插针引脚(跳线帽),可用于切换不同的模式。STM32 引脚详情STM32 Blue Pill 板的完整引脚如下所示。正如你所看到的,G 表示接地引脚,3.3V 输出稳压 3.3V,5V 引脚可用于为电路板供电或通过微型 USB 获得+5V供电。板载 LED 连接到微控制器的 PC13引脚。与 Arduino 板不同的是,STM32 通过 boot 1 和 boot 0 切换不同模式。一般情况下,Boot 1 的位置通常保持不变,把boot 0 跳线设置为 3.3V 用于串口下载,或者设置为接地用于上电或复位后进入正常工作。如何编程 STM32F103C8T6STM32 只是 STMicroelectronics 系列的另一个微控制器。因此,现有的 ARM 芯片编程方法也可以用于 STM32 板。Keil ARM MDK 是一种著名且常用的 IDE,除此之外我们还可以使用 IAR workbench、Atollic TrueStudio、MicroC Pro ARM、Crossworks ARM、Ride 7、PlatformIO+STM32 等。但是,使该板广受欢迎的原因之一在于它能够使用 Arduino IDE 进行编程。许多arduino爱好者通过这种方式,可以立即开始使用 STM32 构建项目,因为他们熟悉 Arduino IDE 及其易于使用的编程语言和现成的库。所以这篇文章中,我们使用Arduino IDE 开始 STM32。FTDI连接图使用 Arduino IDE 对 STM32 Blue Pill 板进行编程,我们需要使用串行板FTDI。该板连接到 STM32 的 Rx 和 Tx 引脚,如下所示。FTDI板的Vcc管脚连接到板子供电的STM32 5V管脚。地连接到STM32的地。FTDI板的Rx和Tx引脚分别连接到STM32的A9和A10引脚。其中 A9 是 STM32 MCU 的 Tx 引脚,A10 是 Rx 引脚。为 STM32准备 Arduino IDE按照以下步骤安装并准备与 STM 32 开发板一起使用的 Arduino IDE。第 1 步:安装Arduino IDE。安装步骤(略)第 2 步:安装 Arduino IDE 后,打开并下载 STM32 开发板所需的包。这可以通过选择“文件 -> 首选项”来完成。第 3 步:单击“首选项”将打开下面显示的对话框。在 “附加开发板管理器网址”文本框中粘贴以下链接,点击 “好”。http://dan.drown.org/stm32duino/package_STM32duino_index.json第 4 步:转到 工具 -> 开发板…->开发板管理器。这将打开“开发板管理器”对话框,搜索“STM32F1”并安装出现的包。第5 步: - 安装完成。转到“工具”并向下滚动找到通用 STM32F103C 系列,选中如下图:第 6 步: 现在,将 FTDI 板连接到计算机,并在设备管理器检查 FTDI 板连接到哪个 COM 口。然后,在“工具”->“端口”中选择相同的端口号:第 7 步: 完成所有设置后,检查 Arduino IDE 的右下角,显示了已经配置的信息。我的 FTDI 板连接到 COM3,但你的可能不同,但是芯片信息确保为 64kFlah 类型,CPU 速度为 72MHz,上传方式为 Serial。到这里 Arduino IDE 已准备好对 STM 32 Blue Pill 开发板进行编程了。上传示例代码到STM32f103c8t6让我们将板载LED闪烁示例程序从 Arduino IDE 上传到 STM32 Blue Pill 板。示例程序可以在 文件—>示例中找到。在打开的示例代码中,我们必须做一点小小的修改。默认情况下,该程序是为PB1编写,但在我们的开发板上,板载LED连接到PC13,因此将所有PB1更换为PC13。最后会给出修改后的完整示例程序。loop函数内部的代码如下所示,我们可以注意到 PC13 引脚保持高电平(开启)1000 毫秒,然后再转低(关闭)1000 毫秒,高低一直循环。因此,LED 以 1000 毫秒的间隔闪烁。digitalWrite(PC13, HIGH); // turn the LED on (HIGH is the voltage level)delay(1000); // wait for a seconddigitalWrite(PC13, LOW); // turn the LED off by making the voltage LOWdelay(1000); // wait for a second如前所述,在上传任何程序之前必须将 STM32 板设置为串口上传模式,为此将boot 0 跳线置于低电平。如下所示:确保 boot 0 短接1的位置,然后按下复位按钮,绿色 LED 熄灭,这表明板子已准备好上传。点击 Arduino IDE 上的上传按钮,您的程序应该被编译和上传。如果程序成功上传,您应该会看到绿色 LED 以 1 秒的间隔闪烁。您还可以修改程序,增加或减少延迟来改变闪烁速度。上传程序后,boot 0 应该短接回0位置,这样下次板子上电时,上传的程序就开始自动执行了。本文到此结束,希望能对你开始使用Arduino IDE 编程STM32有一点帮助。
使用 Arduino IDE 编程你的 STM32 许多电子爱好者和工程师开始接触电子产品时,Arduino是他们的第一块开发板。然而,随着接触越多和深入挖掘,很快就意识到 Arduino 还没有为工业做好准备,而且它的 8 位 CPU 的速度非常慢,不能为您的项目提供足够的动力。不过,现在市场上有新的STM32F103C8T6 STM32开发板,它拥有 32 位的 CPU 和ARM Cortex M3 架构可以轻松超越 Arduino 。并且我们可以使用Arduino IDE对STM32板进行编程。在本文中,我们开始使用 STM32F103C8T6,了解有关此板的一些基础知识并使用 Arduino IDE对其编程, 实现板载 LED 灯闪烁。STM32(Blue Pill)开发板介绍STM32F103C8T6 开发板是 ARM Cortex M3 微控制器的开发板。它看起来与 Arduino Nano 非常相似,如下图所示。它上面的单片机芯片是 STMicroelectronics 的STM32F103C8T6,该MCU 可以在深度睡眠模式下运行,非常适合使用电池供电的应用。由于 MCU 的工作为3.3V,因此该板还包含一个 5V 至 3.3V 的降压 IC为 MCU 供电。即使 MCU 在 3.3V 下运行,它的大多数 GPIO 引脚都可以承受 5V。开发板上有两个板载 LED,一个(红色)用于电源指示,另一个(绿色)连接到 GPIO 引脚 PC13。它还有两个插针引脚(跳线帽),可用于切换不同的模式。STM32 引脚详情STM32 Blue Pill 板的完整引脚如下所示。正如你所看到的,G 表示接地引脚,3.3V 输出稳压 3.3V,5V 引脚可用于为电路板供电或通过微型 USB 获得+5V供电。板载 LED 连接到微控制器的 PC13引脚。与 Arduino 板不同的是,STM32 通过 boot 1 和 boot 0 切换不同模式。一般情况下,Boot 1 的位置通常保持不变,把boot 0 跳线设置为 3.3V 用于串口下载,或者设置为接地用于上电或复位后进入正常工作。如何编程 STM32F103C8T6STM32 只是 STMicroelectronics 系列的另一个微控制器。因此,现有的 ARM 芯片编程方法也可以用于 STM32 板。Keil ARM MDK 是一种著名且常用的 IDE,除此之外我们还可以使用 IAR workbench、Atollic TrueStudio、MicroC Pro ARM、Crossworks ARM、Ride 7、PlatformIO+STM32 等。但是,使该板广受欢迎的原因之一在于它能够使用 Arduino IDE 进行编程。许多arduino爱好者通过这种方式,可以立即开始使用 STM32 构建项目,因为他们熟悉 Arduino IDE 及其易于使用的编程语言和现成的库。所以这篇文章中,我们使用Arduino IDE 开始 STM32。FTDI连接图使用 Arduino IDE 对 STM32 Blue Pill 板进行编程,我们需要使用串行板FTDI。该板连接到 STM32 的 Rx 和 Tx 引脚,如下所示。FTDI板的Vcc管脚连接到板子供电的STM32 5V管脚。地连接到STM32的地。FTDI板的Rx和Tx引脚分别连接到STM32的A9和A10引脚。其中 A9 是 STM32 MCU 的 Tx 引脚,A10 是 Rx 引脚。为 STM32准备 Arduino IDE按照以下步骤安装并准备与 STM 32 开发板一起使用的 Arduino IDE。第 1 步:安装Arduino IDE。安装步骤(略)第 2 步:安装 Arduino IDE 后,打开并下载 STM32 开发板所需的包。这可以通过选择“文件 -> 首选项”来完成。第 3 步:单击“首选项”将打开下面显示的对话框。在 “附加开发板管理器网址”文本框中粘贴以下链接,点击 “好”。http://dan.drown.org/stm32duino/package_STM32duino_index.json第 4 步:转到 工具 -> 开发板…->开发板管理器。这将打开“开发板管理器”对话框,搜索“STM32F1”并安装出现的包。第5 步: - 安装完成。转到“工具”并向下滚动找到通用 STM32F103C 系列,选中如下图:第 6 步: 现在,将 FTDI 板连接到计算机,并在设备管理器检查 FTDI 板连接到哪个 COM 口。然后,在“工具”->“端口”中选择相同的端口号:第 7 步: 完成所有设置后,检查 Arduino IDE 的右下角,显示了已经配置的信息。我的 FTDI 板连接到 COM3,但你的可能不同,但是芯片信息确保为 64kFlah 类型,CPU 速度为 72MHz,上传方式为 Serial。到这里 Arduino IDE 已准备好对 STM 32 Blue Pill 开发板进行编程了。上传示例代码到STM32f103c8t6让我们将板载LED闪烁示例程序从 Arduino IDE 上传到 STM32 Blue Pill 板。示例程序可以在 文件—>示例中找到。在打开的示例代码中,我们必须做一点小小的修改。默认情况下,该程序是为PB1编写,但在我们的开发板上,板载LED连接到PC13,因此将所有PB1更换为PC13。最后会给出修改后的完整示例程序。loop函数内部的代码如下所示,我们可以注意到 PC13 引脚保持高电平(开启)1000 毫秒,然后再转低(关闭)1000 毫秒,高低一直循环。因此,LED 以 1000 毫秒的间隔闪烁。digitalWrite(PC13, HIGH); // turn the LED on (HIGH is the voltage level)delay(1000); // wait for a seconddigitalWrite(PC13, LOW); // turn the LED off by making the voltage LOWdelay(1000); // wait for a second如前所述,在上传任何程序之前必须将 STM32 板设置为串口上传模式,为此将boot 0 跳线置于低电平。如下所示:确保 boot 0 短接1的位置,然后按下复位按钮,绿色 LED 熄灭,这表明板子已准备好上传。点击 Arduino IDE 上的上传按钮,您的程序应该被编译和上传。如果程序成功上传,您应该会看到绿色 LED 以 1 秒的间隔闪烁。您还可以修改程序,增加或减少延迟来改变闪烁速度。上传程序后,boot 0 应该短接回0位置,这样下次板子上电时,上传的程序就开始自动执行了。本文到此结束,希望能对你开始使用Arduino IDE 编程STM32有一点帮助。